In case you missed our recent blog, Equal Experts is supporting me in something quite dramatic – a record attempt!
I work with the boys and girls of Addingham Scout Group and we recently worked on a project to float a balloon up to the edge of space. It was a really successful experience and now EE (who I work with as a Technical Architect) is working with me to push things up a notch.
The plan is to break the record for the highest altitude in horizontal flight by a winged aircraft, and to make that happen, here’s what we plan to do:
Our balloon will lift our unmanned aerial vehicle (UAV) to 30,500 metres
The UAV will be released and will fall. Once enough speed is reached – at around 30,000m – we aim to level it out and achieve horizontal flight.
The UAV will circle, gradually losing altitude and heading towards the landing area (well away from any air corridor).
The balloon will continue upwards to about 36km, at which point it will burst, allowing its onboard camera to descend.
Achieving all this will obviously take a bit of effort! We completed the first part with a successful maiden flight of our UAV.
Our maiden voyage
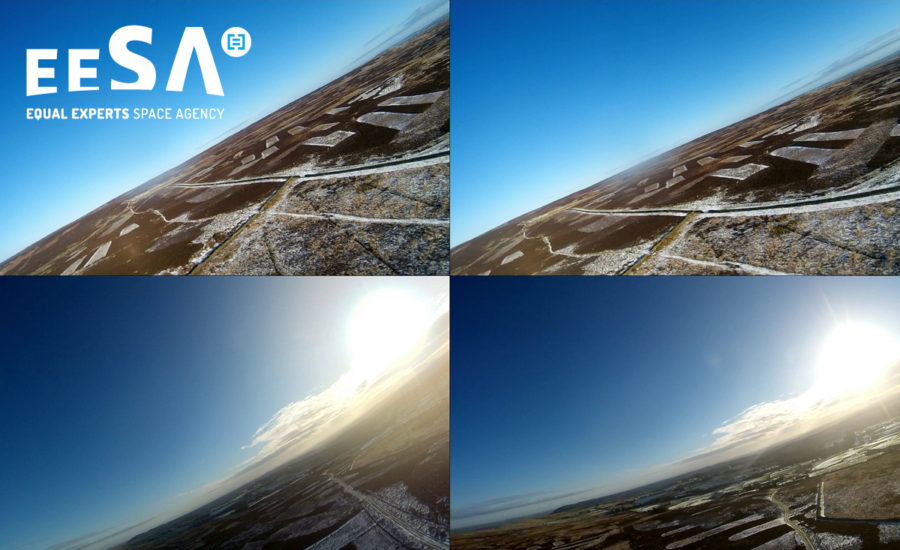
We won’t beat the record without testing our gear, so the main object of this exercise was simply to see how our UAV flies. We’ll be using a bigger airframe for the actual record attempt but I wanted to see how my existing drone handled the weight of the cameras (there are three onboard). You can see for yourself with the footage below:
The good news is it went really well. There was a bit of wobble but tuning the flight computer and adding some carbon rods to stiffen the wings should put that right. And the battery used only 10% of its capacity for two 3-minute flights, which is very encouraging.
Here’s a breakdown of what I was hoping to discover, and what I learned:
Start tuning the flight computer: More tuning is needed to decrease wing wobble, increase control response and increase climb rate;
Test the longevity of the batteries: Batteries performed well – a total of 480mAh (of 4400mAh) was used over 6 minutes flight, including take-off;
See how it performs with the Gear 360 camera on the bottom: This was put on for the second test and handling suffered with the 360 camera, as it caused a lot of drag; things will hopefully improve with flight computer tuning;
Landing on semi-auto flight mode: The landing was very smooth using Fly By Wire B flight mode
Test centre of gravity: This was spot-on, even with the 360 camera on the bottom;
Test Return to Landing mode: this also helps to establish the accuracy of the onboard GPS. It worked, but the turn home was very slow – something else that needs tuning!
All in all, then, a very satisfactory start. Our next steps:
Make the prototype fully autonomous, including auto-landing and emergency procedures
Build the full-size plane so that we know how much it’s going to weigh
First balloon launch – with a box payload weighing the same as the full size plane it will eventually haul up to the stratosphere…
We’ll keep you posted!
Get in touch
Solving a complex business problem? You need experts by your side.
All business models have their pros and cons. But, when you consider the type of problems we help our clients to solve at Equal Experts, it’s worth thinking about the level of experience and the best consultancy approach to solve them.
If you’d like to find out more about working with us – get in touch. We’d love to hear from you.